「ROBO-HI DANCE」– Mô Hình Phối Hợp Giữa Con Người Và Robot
ROBO-HI Corporation chính thức bắt đầu cung cấp dịch vụ mới “ROBO-HI® DANCE” giúp chuyển đổi số (DX) môi trường làm việc tại chỗ và hoạt động của con người bằng cách sử dụng “ROBO-HI® OS” – một hệ điều hành AOS (Autonomous Operating System), cho phép vận hành hoàn toàn tự động tại chỗ mà không cần sự can thiệp của con người.
Dịch vụ này đề xuất phương thức triển khai theo từng giai đoạn nhằm nâng cao khả năng sinh lời tại hiện trường thông qua các bước triển khai chắc chắn, thay vì hướng đến tự động hóa hoàn toàn chỉ trong một bước.

ROBO-HI DANCE Website:https://www.robo-hi.jp/robo-hi/robo-hi-dance
Lộ trình phát triển 03 bước mà “ROBO-HI DANCE” hướng đến
「ROBO-HI DANCE」là dịch vụ mới được trang bị AOS có khả năng tự động phân bổ tối ưu nguồn lực con người và robot đến các tác vụ phù hợp trong lĩnh vực dịch vụ hiện trường.
Dịch vụ này sẽ được triển khai và mở rộng theo 3 bước, từ “DX hóa hiện trường và con người” đến “tích hợp nguồn lực robot”, tùy theo tình trạng thực tế của hiện trường.
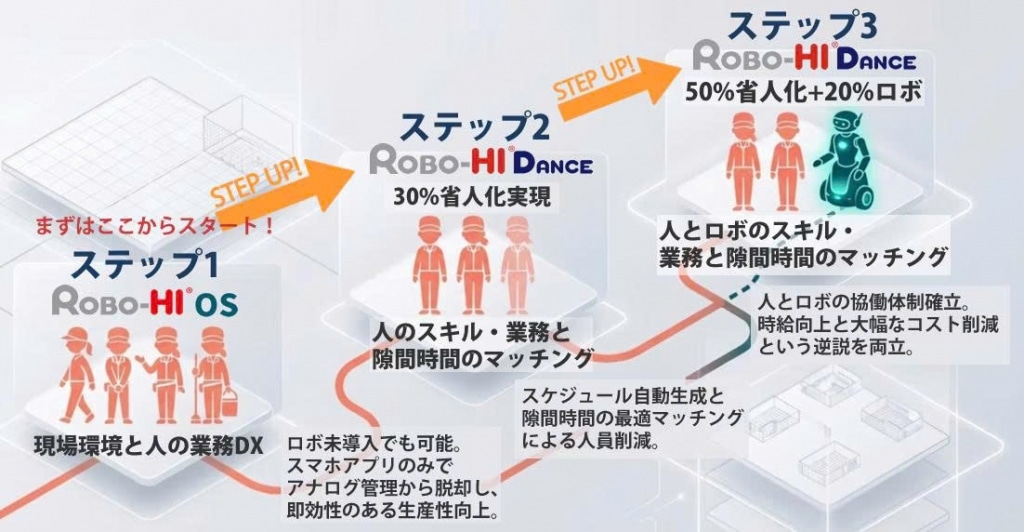
Bước 1: [ROBO-HI OS] DX hóa môi trường hiện trường và nghiệp vụ của con người
Là nền tảng để triển khai robot, bước này số hóa môi trường hiện trường và nghiệp vụ của con người, đồng thời xây dựng nền tảng giúp mở rộng năng lực vận hành.
<DX môi trường hiện trường: Xây dựng bản đồ 3D và triển khai nghiệp vụ>
- Số hóa không gian 3 chiều: Thực hiện bản đồ hóa 3D cho cơ sở mục tiêu, quản lý nghiệp vụ và khu vực điều phối trong phạm vi vài kilomet trên không gian số.
- Xây dựng môi trường điều khiển: Triển khai các tác vụ nghiệp vụ cụ thể trên bản đồ. Dựa trên thông tin vị trí, hệ thống thiết lập môi trường cho phép điều khiển tối ưu con người và các thiết bị (thang máy, cửa cuốn, v.v.).
<DX con người: Mở rộng năng lực bằng smartphone và tablet>
- Hiển thị kỹ năng: Đăng ký bộ kỹ năng của nhân viên và tự động phân công đúng người đúng việc.
- Hỗ trợ bằng các chức năng cốt lõi của EYECAN※: Hỗ trợ nhân viên với 3 chức năng gồm “AR Navi (dẫn đường tuyến ngắn nhất)”, “Scan (phát hiện bất thường)” và “Action (chỉ dẫn thao tác bằng AR)”.
※EYECAN Website:https://www.robo-hi.jp/robo-hi/eyecan
- Nâng cao động lực làm việc: Áp dụng hệ thống đánh giá và gamification (trò chơi hóa) nhằm đồng thời nâng cao năng suất và động lực của nhân viên.
Bước 2: [ROBO-HI DANCE] Kết nối kỹ năng, nghiệp vụ và thời gian trống của con người
Dựa trên môi trường đã được số hóa, bước này tối ưu hóa nguồn nhân lực và nâng cao năng suất.
- Tối ưu kết nối thời gian trống: Các nguồn lực dư thừa phát sinh nhờ tinh giản nhân sự sẽ được cung cấp cho doanh nghiệp hoặc ngành nghề khác thông qua công cụ kết nối, tạo ra cơ hội doanh thu mới.
- Tăng cường hợp tác khu vực: Tối ưu hóa việc hỗ trợ nhân sự và ủy thác công việc giữa các cửa hàng lân cận vượt ra ngoài phạm vi của từng cửa hàng riêng lẻ.
Hiệu quả dự kiến của bước 2 là giảm 30% nhân sự.
Bước 3: [ROBO-HI DANCE] Kết nối kỹ năng, nghiệp vụ và thời gian trống giữa con người và robot
Robot sẽ phối hợp hoàn toàn trong khu vực dịch vụ đã được DX hóa, hiện thực hóa việc tinh giản nhân sự sâu hơn và vận hành hiện trường hiệu quả cao.
- Mô hình vận hành hybrid: Công việc của robot được triển khai trên bản đồ. Robot đảm nhận vận chuyển hàng nặng và vệ sinh sàn, còn con người đảm nhận các công việc đòi hỏi tính chính xác cao hoặc phục vụ khách hàng trực tiếp. Hệ thống sẽ tự động phân công công việc theo mức độ phù hợp.
- Kết hợp điều khiển vật lý: Khi robot bị kẹt trước cổng an ninh, hệ thống sẽ tự động thông báo cho nhân viên, thực hiện bàn giao liền mạch để không làm gián đoạn hiện trường.
Hiệu quả dự kiến đến bước 3 bao gồm:
- Giảm 50% nhân sự
- 20% ứng dụng robot
- Giảm 70% chi phí đào tạo, bao gồm hỗ trợ đa ngôn ngữ hóa và hướng dẫn (tutorial).