ROBO-HI®Making Robots a Part of Social Infrastructure
Create a fun and convenient society
ROBO-HI Corporation is expanding the places where robots operate, from office buildings, residential complexes, hotels, and hospitals to entire cities.
ROBO-HI OS is a Multi-vendor Robot Platform, a general-purpose operating system that deploys and manages robots on behalf of humans for facility management operations within buildings and across cities, such as delivery, cleaning, security, reception, and human transportation.
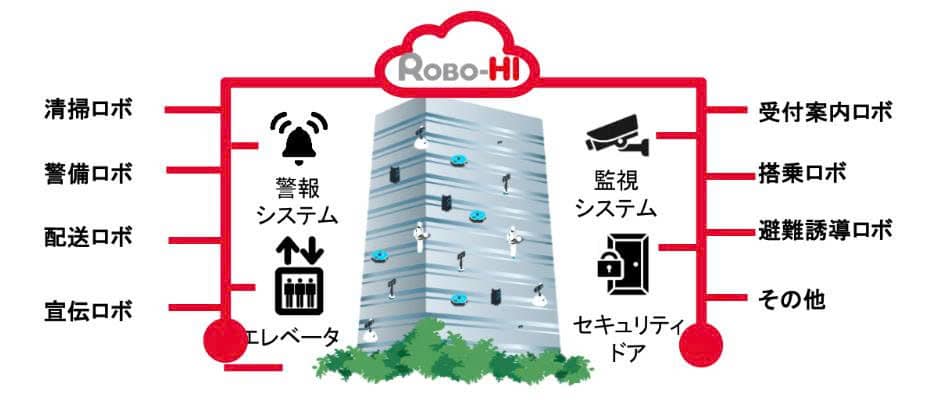
The system can integrate robots with various facilities and systems, including elevators and security doors. We will promote the widespread adoption of ROBO-HI OS as a “social infrastructure” that is useful in people’s daily lives.
Multi-vendor Support
By centrally managing robots from around the world through ROBO-HI OS, management and operational costs are reduced.
In addition, integration with facilities such as elevators and security doors expands the operational range of robots and maximizes return on investment (ROI).
One-stop Cloud Service for Robot Utilization
ROBO-HI OS functions as RFP (Robot Facility Planning), similar to an enterprise’s ERP (Enterprise Resource Planning) system, enhancing the asset value of facilities such as buildings while improving operational efficiency and reducing labor requirements.
ROBO-HI OS is a one-stop cloud service packaged from system groups that have been refined through many years of real-world robot operation by ROBO-HI Corporation (formerly ZMP).
1. Monitoring and Control

Visualizes real-time operational status. Equipped with optimal traffic control for multiple robots, as well as alert and notification functions in the event of issues, ensuring safe and reliable robot operation.
2. Data Analysis

Accumulates robot operation data and provides it in the form of productivity reports. Features such as time-period specification and CSV download support data-driven operational optimization.
3. High-precision 3D Maps for Autonomous Driving

High-precision 3D maps developed through autonomous driving technologies serve as digital infrastructure for cities and buildings.
They can be utilized not only for robots but also for various other applications.
4. Digital Twin & Simulator

By setting human flow, logistics flow, and facilities in cities or buildings, physical simulations are performed to determine appropriate robot operating areas and optimal numbers of robots.

Executed Services
Map Creation
-
Converts real-world environments into high-precision 3D maps using RoboMap
-
Capable of converting from BIM (Building Information Modeling) to point cloud data
-
Supports various data formats used by different robot manufacturers (2D/3D point clouds, occupancy grids, etc.)
-
Provides conversion tools to align disparate map coordinates used by different robots with the centrally managed ROBO-HI absolute coordinate system
Semantic Mapping & Editing
-
Services that configure robot scenarios
(e.g., moving from point A to point B, changing eye expressions, playing audio, riding an elevator to another floor, etc.) -
Provides semantic information to robots and external services
(e.g., drivable areas, signal information, road-crossing information, elevator waiting areas, priority traffic control areas, etc.)
Route Creation
-
Generates optimal routes to destinations in real time
-
Responds to the influence of external data, dynamically changing and optimizing routes in real time
Traffic Control
-
Coordinates multiple robots to prevent collisions and ensure safe operation in narrow areas
-
Defines robot priorities and waiting areas to determine which robot proceeds first upon entering an area
-
Priority areas: used in narrow spaces where only one robot can pass – determines which robot has priority
-
Waiting areas in front of elevators: queues multiple robots while waiting to board elevators
Robot Integration
-
Communication between robots and ROBO-HI
- From robot to ROBO-HI:
Position, robot tasks, robot status, speed, battery status, robot and elevator status, etc. - From ROBO-HI to robot:
Sends traffic control commands (start/stop), tasks, and scenarios -
Task: the robot moves from point A to point B
-
Scenario: a collection of tasks; sends the status of devices (elevators, automatic doors, etc.)
Robot Dispatch
-
Coordinates tasks among multiple robots
-
Robot selection: selects service type (e.g., cleaning, delivery) and automatically assigns the most suitable robot
-
Dispatch scheduling:
a) On-demand: dispatches a robot and executes the task immediately
b) Scheduled: assigns a robot to execute a task at a specified time -
On-site handling:
For example, if a robot encounters an error or runs out of battery, another available robot is reassigned to the task
Simulation
-
Performs physical simulations of indoor and outdoor robot operations using RoboSim
-
When simulation data is introduced into IZAC, robots manufactured by ZMP can operate immediately
-
Proven system stress test results (Simulation of 100 delivery, cleaning, and guidance robots operating in a 12-story building, along with elevators, automatic doors, and security gates)
Latest Post

『RakuRo』Brought an Autonomous Mobility Experience to the “Working Vehicles Wonderland” Exhibition
2026-07-22 07:09:23




