「ROBO-HI DANCE」– A Human-Robot Collaborative Operation Model
ROBO-HI Corporation has launched “ROBO-HI® DANCE” a new service that utilizes the AOS (Autonomous Operating System) “ROBO-HI® OS” which enables fully autonomous field operations without human intervention, to drive digital transformation (DX) of field environments and human operations.
Rather than pursuing full automation in a single leap, this service advocates a phased implementation approach that steadily improves field profitability step by step.

ROBO-HI DANCE Website:https://www.robo-hi.jp/robo-hi/robo-hi-dance
The 3-Step Evolution Roadmap Envisioned by “ROBO-HI DANCE”
「ROBO-HI DANCE」is a new service equipped with an AOS that autonomously allocates human and robot resources to the most suitable tasks in field services.
Depending on on-site conditions, the service will be implemented and expanded in three stages, from “DX for field environments and people” to “robot resource integration.”
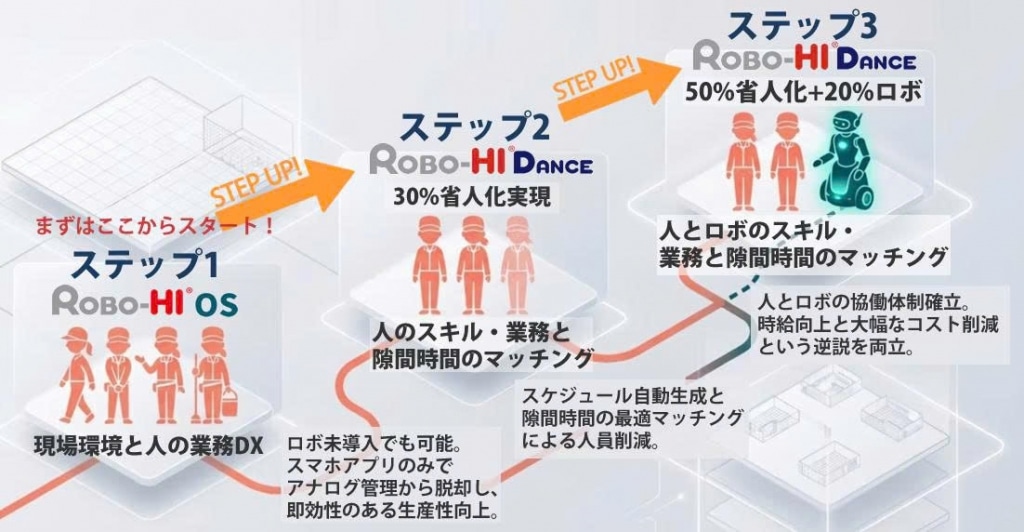
Step 1: [ROBO-HI OS] DX for Field Environments and Human Operations
As the foundation for robot implementation, this step digitalizes field environments and human operations while building a platform that enhances operational capabilities.
<Field Environment DX: 3D Mapping and Operational Implementation>
- 3D Space Digitalization: The target facility is converted into a 3D map, enabling management of operations and dispatch areas covering several kilometers within a digital space.
- Control Environment Setup: Specific operational tasks are implemented on the map. Based on location information, the system establishes an environment that enables optimal control of people and equipment (such as elevators and shutters).
<Human DX: Capability Enhancement via Smartphones and Tablets>
- Skill Visualization: Staff skill sets are registered, enabling automatic assignment of the right people to the right tasks.
- Support Through EYECAN Core Functions※: Staff are supported through three functions: “AR Navi (shortest-route guidance),” “Scan (anomaly detection),” and “Action (AR work instructions).”
※EYECAN Website:https://www.robo-hi.jp/robo-hi/eyecan
- Motivation Improvement: Evaluation systems and gamification are introduced to improve both productivity and staff motivation.
Step 2: [ROBO-HI DANCE] Matching Human Skills, Tasks, and Idle Time
Based on the digitalized environment, this step optimizes human resources and improves productivity.
- Optimal Matching of Idle Time: Surplus resources generated through labor reduction can be provided to other companies and industries through a matching engine, creating new revenue opportunities.
- Enhanced Area Collaboration: Staff support and task outsourcing between nearby stores are optimized beyond the boundaries of individual locations.
The expected effect of Step 2 is a 30% reduction in labor requirements.
Step 3: [ROBO-HI DANCE] Matching Human and Robot Skills, Tasks, and Idle Time
Robots fully collaborate within DX-enabled service areas, enabling further labor reduction and highly efficient field operations.
- Hybrid Operational Structure: Robot tasks are implemented on the map. Robots handle heavy cargo transportation and floor cleaning, while humans perform precise operations and customer-facing services. The system autonomously assigns tasks according to suitability.
- Integration of Physical Control: If a robot becomes stuck in front of a security gate, the system automatically notifies staff members, enabling seamless handovers without interrupting field operations.
Expected effects by Step 3 include:
- 50% labor reduction
- 20% robot utilization
- 70% reduction in training costs through multilingual support and tutorials
Press Release
Latest Post

『RakuRo』Brought an Autonomous Mobility Experience to the “Working Vehicles Wonderland” Exhibition
2026-07-22 07:09:23




