ROBO-HI® Nền tảng robot đa hệ sinh thái
Kiến tạo một xã hội tiện nghi và thú vị
ROBO-HI đang mở rộng không gian hoạt động của robot từ các tòa nhà văn phòng, khu căn hộ, khách sạn, bệnh viện cho đến toàn bộ quy mô đô thị.
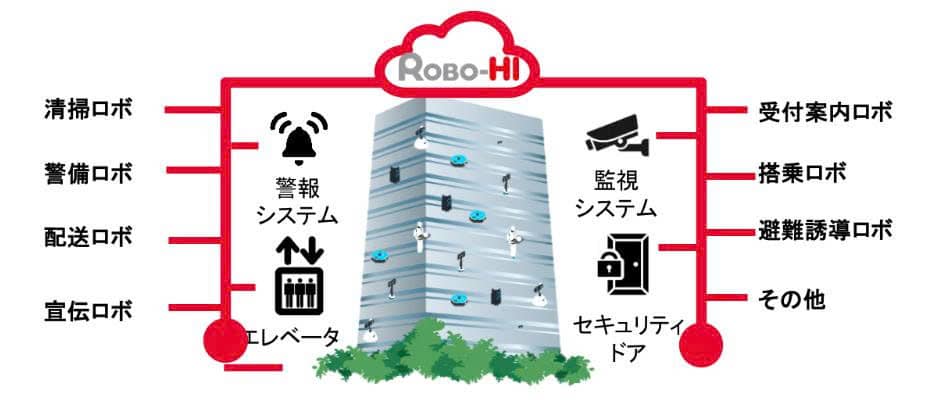
ROBO-HI OS là nền tảng quản lý robot đa nhà cung cấp, đóng vai trò như một hệ điều hành đa năng. Hệ thống cho phép triển khai và quản lý robot thay thế con người trong các nhiệm vụ vận hành cơ sở hạ tầng như giao nhận, vệ sinh, an ninh, lễ tân và vận chuyển hành khách. Robot có thể kết nối liền mạch với các thiết bị trong tòa nhà như thang máy, cửa tự động và hệ thống an ninh.
ROBO-HI hướng tới việc thúc đẩy robot trở thành một phần của “hạ tầng xã hội”, góp phần nâng cao chất lượng cuộc sống hằng ngày.

Khả năng tương thích đa dạng
ROBO-HI OS cho phép quản lý tập trung robot trên toàn cầu, giúp giảm chi phí quản lý và vận hành. Đồng thời, việc kết nối với các thiết bị như thang máy và cửa an ninh giúp mở rộng phạm vi hoạt động của robot, từ đó tối đa hóa hiệu quả đầu tư (ROI).
Dịch vụ Cloud One-stop vận hành Robot
ROBO-HI OS đóng vai trò là RFP (Robot Facility Planning), giúp nâng cao giá trị tài sản của các công trình, tòa nhà, đồng thời tối ưu hóa vận hành và giảm phụ thuộc vào nhân lực tương tự như hệ thống ERP trong doanh nghiệp.
ROBO-HI OS là dịch vụ đám mây dạng one-stop, được đóng gói từ hệ thống công nghệ đã được ROBO-HI Co., Ltd. (trước đây là ZMP) hoàn thiện qua nhiều năm vận hành robot thực tế.
1. Giám sát và điều khiển
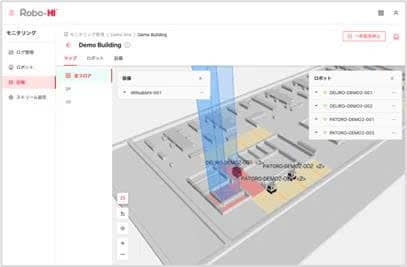
Hiển thị trực quan trạng thái hoạt động theo thời gian thực. Hệ thống cho phép điều phối và kiểm soát giao thông tối ưu cho nhiều robot, đồng thời cảnh báo và thông báo kịp thời khi xảy ra sự cố, đảm bảo vận hành robot an toàn và tin cậy.
2. Phân tích dữ liệu

Lưu trữ dữ liệu hoạt động của robot và cung cấp dưới dạng báo cáo năng suất. Hệ thống hỗ trợ chỉ định khoảng thời gian, tải dữ liệu CSV, hỗ trợ tối ưu hóa vận hành dựa trên dữ liệu.
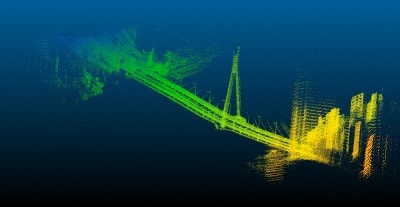
3. Bản đồ 3D độ chính xác cao cho vận hành tự động

Bản đồ 3D độ chính xác cao được phát triển từ công nghệ tự động vận hành đóng vai trò như hạ tầng số cho đô thị và tòa nhà, có thể ứng dụng cho robot và nhiều nền tảng khác nhau.
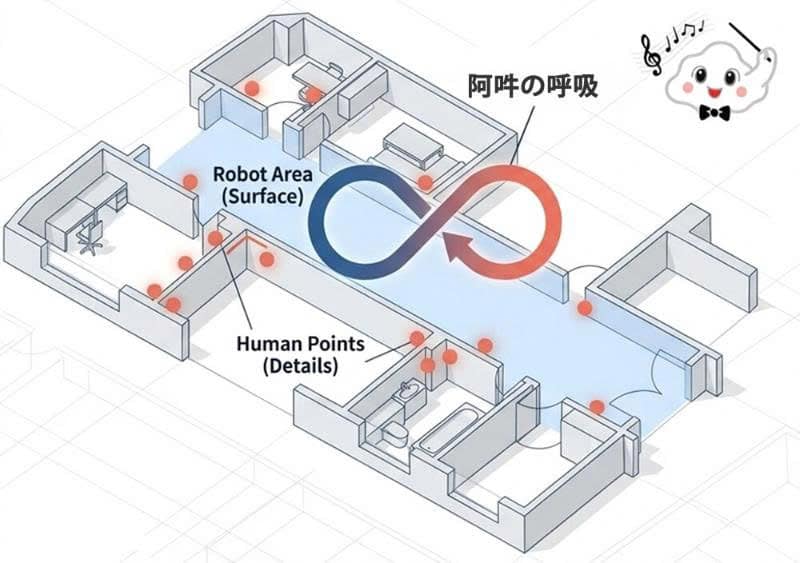
4. Mô phỏng Digital Twin

Thiết lập dòng người, luồng logistics và hệ thống thiết bị trong đô thị và tòa nhà, từ đó mô phỏng vật lý khu vực hoạt động và số lượng robot phù hợp.

5. Các dịch vụ vận hành chính
Tạo bản đồ
- Chuyển đổi môi trường thực tế thành bản đồ 3D độ chính xác cao bằng RoboMap.
- Hỗ trợ chuyển đổi từ dữ liệu BIM (Building Information Modeling) sang Point Cloud.
- Tương thích với mọi định dạng dữ liệu từ các hãng robot khác nhau (2D/3D Point Cloud, Occupancy Grid,…).
- Cung cấp công cụ chuyển đổi tọa độ, thống nhất các hệ tọa độ bản đồ khác nhau của robot về hệ tọa độ tuyệt đối ROBO-HI
Biên tập và gán ngữ nghĩa cho bản đồ
- Thiết lập kịch bản vận hành: Di chuyển từ A đến B, thay đổi biểu cảm/âm thanh, tự đi thang máy,…
- Cung cấp thông tin ngữ nghĩa cho robot và hệ thống bên ngoài: Khu vực được phép di chuyển, tín hiệu giao thông, vạch sang đường,
khu vực chờ thang máy, khu vực ưu tiên điều phối.
Thiết lập lộ trình
- Tự động tạo lộ trình tối ưu đến điểm đích theo thời gian thực.
- Cập nhật và điều chỉnh đường đi linh hoạt dựa trên các biến động từ dữ liệu ngoại vi.
Điều phối giao thông
- Quản lý cùng lúc nhiều robot để tránh va chạm và đảm bảo an toàn trong không gian hẹp.
- Thiết lập thứ tự ưu tiên và khu vực chờ, quyết định robot nào được di chuyển trước khi vào khu vực nhất định
- Khu vực ưu tiên: dùng cho lối đi hẹp chỉ cho phép 1 robot đi qua
- Khu vực chờ trước thang máy: sắp xếp nhiều robot xếp hàng chờ sử dụng thang máy
Tích hợp robot
- Kết nối liên tục giữa robot và hệ thống ROBO-HI.
- Robot → ROBO-HI: Báo cáo vị trí, trạng thái (đang làm việc, tốc độ, pin), trạng thái thang máy.
- ROBO-HI → Robot: Lệnh điều phối (di chuyển / dừng), tác vụ và kịch bản
- Tác vụ: robot di chuyển từ điểm A đến B. Kịch bản: tập hợp nhiều tác vụ, trạng thái thiết bị (thang máy, cửa tự động…)
Điều phối robot
- Điều chỉnh và quản lý tác vụ của nhiều robot
- Tự động chọn loại robot phù hợp nhất (vệ sinh, giao hàng,…) cho từng nhiệm vụ.
- Thiết lập thời gian thực hiện: a) On-demand: thực hiện ngay khi có yêu cầu. b) Theo lịch: thực hiện vào thời điểm được chỉ định
- Xử lý sự cố: Tự động điều động robot dự phòng nếu robot chính gặp lỗi hoặc hết pin.
Mô phỏng
- Sử dụng RoboSim để mô phỏng vật lý hoạt động của robot trong môi trường trong nhà và ngoài trời. Dữ liệu mô phỏng có thể đưa vào IZAC, cho phép robot ZMP vận hành trực tiếp.
- Kiểm tra chịu tải hệ thống: Mô phỏng 100 robot (giao hàng, vệ sinh, hướng dẫn) trong tòa nhà 12 tầng, bao gồm vận hành thang máy, cửa tự động và cổng an ninh.